眼看农历新年就要来了,但它们却因「期末成绩单」着急了起来。
近日,美国加利福利亚州车辆管理局(DMV)发布了2017年度自动驾驶成绩单,也就是脱离报告,其中共有19家公司提交报告,这些报告反映了它们各自在2016年12月1日至2017年11月30日之间自动驾驶的路测结果。
「自动驾驶模式中的“脱离”是指在自动驾驶测试中,系统无法进入自动驾驶模式或终止自动驾驶模式改由人工控制的情况。」

报告的内容包括三个最重要的点:1.路测里程、2.脱离次数、3.脱离原因。每英里脱离次数越少,自动驾驶技术越成熟。
下表则为“19”家公司提交的脱离报告汇总,以路测里程由大到小排序。

但值得注意的是它们虽然都在加州测试,但不同公司测试的地理位置、环境甚至测试标准都不一样,有些公司只选择在高速测试,有些则选择高速+城市路面结合,另外有些会测试L2、L3的自动驾驶技术,而有些则直接测试L4级别。因此成绩横向对比很难有实际结论,我们更倾向于看它们“脱离”的原因。
有趣的是今年共有7家公司交了“白卷”,这当中就包括了在2016年成绩垫底的特斯拉,当然我们再一次强调因为测试条件的不统一,公司之间的成绩对比没有任何意义,可能这也是那7个坏学生交“白卷”的原因吧~
「交白卷名单:BMW(因未在加州进行测试)、Ford(因未在加州进行测试)、本田(因未在加州进行测试)、大众(因未在加州进行测试)、蔚来(只测试了L2级别辅助驾驶系统)、特斯拉(不属于真正的自动驾驶)、Wheego(原因不明)」

从测试里程来看,通用比2016年积极了不少,里程数从上年的9776英里新增到131675英里,其余的各家只有小幅度增长,甚至有些“只减不增”。
通用在今年扩大了测试车队的规模,并且最近还公布了一款没有方向盘、没有踏板的自动驾驶汽车,并计划在2019年正式投入使用,势头可以说相当猛。
「 Waymo 」
Waymo今年进行了352544.6英里的路测,比2016年的635868英里少了很多,而测试里程减少的原因可能在于Waymo正在落地L4级别的自动驾驶技术,并且已经在亚利桑那州的凤凰城试运行。
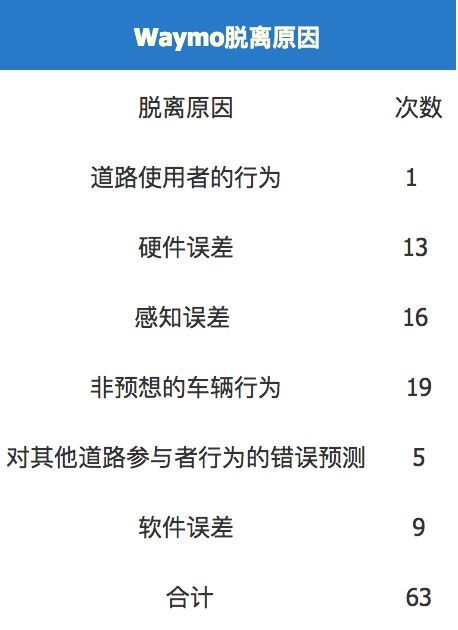
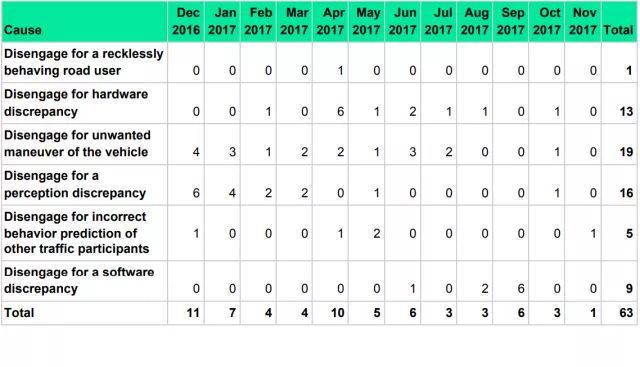
此次报告显示,Waymo共发生了63次的脱离,其中57次发生在街道,6次发生在高速。脱离原因主要包括预想之外的车辆行为、感知误差以及硬件问题等等。

Waymo从2009年开始进行路测,截止到2017年11月,Waymo的累计路试里程已经达到400万英里,遍布美国二十多个城市,可以说是目前最积极测试的公司。
「 通用Cruise 」
通用今年进行了131675英里的路测,一共发生了105次的脱离。而详细报告指出,导致脱离的主要因素包括预想之外的车辆行为,路径规划错误、道路建筑施工等等。

值得一提的是,通用此次的测试都在交通状况较为复杂的旧金山城区内进行,因此脱离次数比上年增加不少。
「 Drive.ai 」
自动驾驶创业团队Drive.ai首次提交了路测的成绩单,在今年它进行了6572英里的路测,其中共发生151次脱离。

在151次的脱离中,道路规划错误占据了79次,主动脱离(未知原因)占39次,而错误的系统感知则占19次。
可能大家会对Drive.ai有些许陌生,其实在17年年初,Drive.ai就发布了一段长约4分钟的雨夜测试视频,这对于Drive.ai来说已经算是不错的成果,要知道Waymo已经持续了好几年在雨天环境下进行测试,因为传感器可能会因为雨水“致盲”。
「 日产 」
日产今年进行了5007英里的路测,与上年的4099英里相比有小幅度增长。报告显示日产的脱离次数为24。

从报告看,日产选择了高速路+城市道路相结合的测试模式,但天气方面只选择晴天进行测试。脱离的原因有14次因为系统问题、6次因为无人车减速而可能导致其他车辆追尾。而有消息表示在脱离的时候有9次因为软件奔溃,从上年的数据看这个问题依然存在。
「 百度 」
百度第一次提交路测数据,测试里程为1971.74英里,其中脱离次数为49次,主要原因为感知差异。另外非预想的车辆行为也占了9次。

「 Telenav 」
在报告中Telenav路测的里程数为1824英里,共发生58次脱离,其中未预测到前方减速的车辆占20次,而因为道路车道线不清晰占据的脱离次数则为19。

「 安波福 」
安波福路测的里程为1810.6英里,与Telenav相近,而脱离次数则为81次,因为安波福的测试主要集中在加州的城市以及城市之间的高速路上,所以脱离的原因集中在行人/骑行者过多、交通灯检测上,而因为车道线不清晰带来的脱离则有9次。

不少公司提交上来的报告没有写明具体的脱离原因,因此我们就不拿来分析。从整体看来,Waymo与通用Cruise的自动驾驶技术相对比较成熟(较少的每英里脱离次数、相对充足的测试里程)感知错误与非理想的行驶规划问题是造成脱离的主要诱因。
「仿真软件正在路上,道路设施也该升级改造」
在复杂的道路环境下,自动驾驶系统需要不断收集数据去分析学习,此次提交报告的19家公司/车企有不少只具备了一辆测试车或是只进行了较短里程的测试,相信这除了资金限制之外,越来越多的仿真软件正在代替真实路测。
此外,我们从安波福以及Telenav的脱离报告可以发现,车道线不清晰也是导致它们脱离的主要因素,因此“释放双手”不能只依靠自动驾驶公司/车企,ZF也必须对道路设施进行及时的维护或者升级改造。

最后,我们还是希望自动驾驶技术能更聪明,适应更多突发的情况(包括刚才提到的车道线问题),毕竟自动驾驶关于到生命安全,即使像Waymo每5556英里才“有机会”脱离1次这样的概率也是不能接受的。
===
想更进一步了解新能源车?欢迎扫码关注我们的微信号:



 粤公网安备 44010602000157号
粤公网安备 44010602000157号
