

【有车以后 技术】时间回到2021年年初的NIO DAY 2020,蔚来首款中大型纯电轿车——ET7首发亮相。而最瞩目,同时也最具争议的设计,自然是ET7车顶的“瞭望塔”式激光雷达以及“小牛角”。
蔚来ET7的激光雷达究竟有多强?" img_height="699" img_width="1269" inline="0" src="http://img.pcauto.com.cn/images/ttauto/2022/07/13/7113738649681855009/155f238013954ad99f9b0fe04222b8e7.png">
而仅过去一年有余,2022年激光雷达便纷纷上车,车顶的“瞭望塔”也成为当下蔚来新车的标志性设计之一。作为首批搭载激光雷达的车型,蔚来ET7的激光雷达背负着沉重的额使命,其实力自然也不容小觑。数据显示,截止近日,蔚来用户使用NIO PILOT辅助驾驶行驶的总里程已经达到4.4亿公里,其中使用领航辅助NOP的用户累计里程已达1.67亿公里。今天就让我们一起来深入研究一番,看看蔚来ET7的激光雷达究竟有多牛?

什么是激光雷达?
在探索蔚来ET7的激光雷达之前,我们不妨先来看一下什么是激光雷达。如今智能电动汽车上搭载的激光雷达,多为LiDAR(Light Detection And Ranging),它包括一个单束窄带激光器和一个接收系统。激光器产生并发射一束光脉冲,打在物体上并反射回来,最终被接收器所接收。接收器通过测量光脉冲从发射到被反射回的传播时间,计算出车辆与反射物之间的距离。
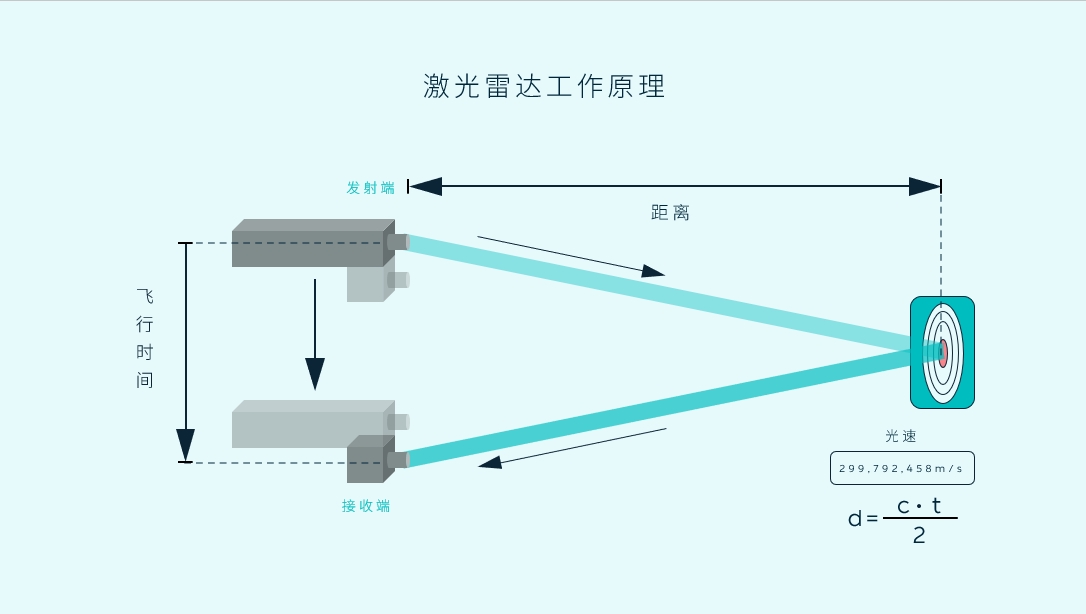
激光雷达发射并接受若干光脉冲,通过计算自身与周围障碍物之间的距离,输出三维空间数据。
为什么要选择激光雷达?
先说结论:激光雷达能让整车感知能力实现质的飞跃 ,对于提升自动驾驶/自动辅助驾驶的安全性具有极大价值。
在目前的自动驾驶感知方案中,摄像头与毫米波雷达的组合较为成熟,中高端车型已经普遍配装。不过在当前技术条件下,摄像头+毫米波雷达的方案在面对强光、隧道逆光、黑夜、未经算法训练的物体等场景下难以可靠识别障碍物。
此外,目前摄像头、甚至多目摄像头,配合视觉算法,依然较难提供自动驾驶感知层面至关重要的深度信息,目标物体越远,深度信息精度越低。
而激光雷达通过收集反射光脉冲,输出三维空间数据,并为视觉传感器提供可靠的深度信息,整体传感器达到互为冗余,达到整车感知的升维,提升感知的可靠性。车辆可有效识别路面凸起、井盖缺失、抛洒物、大型静止障碍物等目前摄像头难以识别的目标。
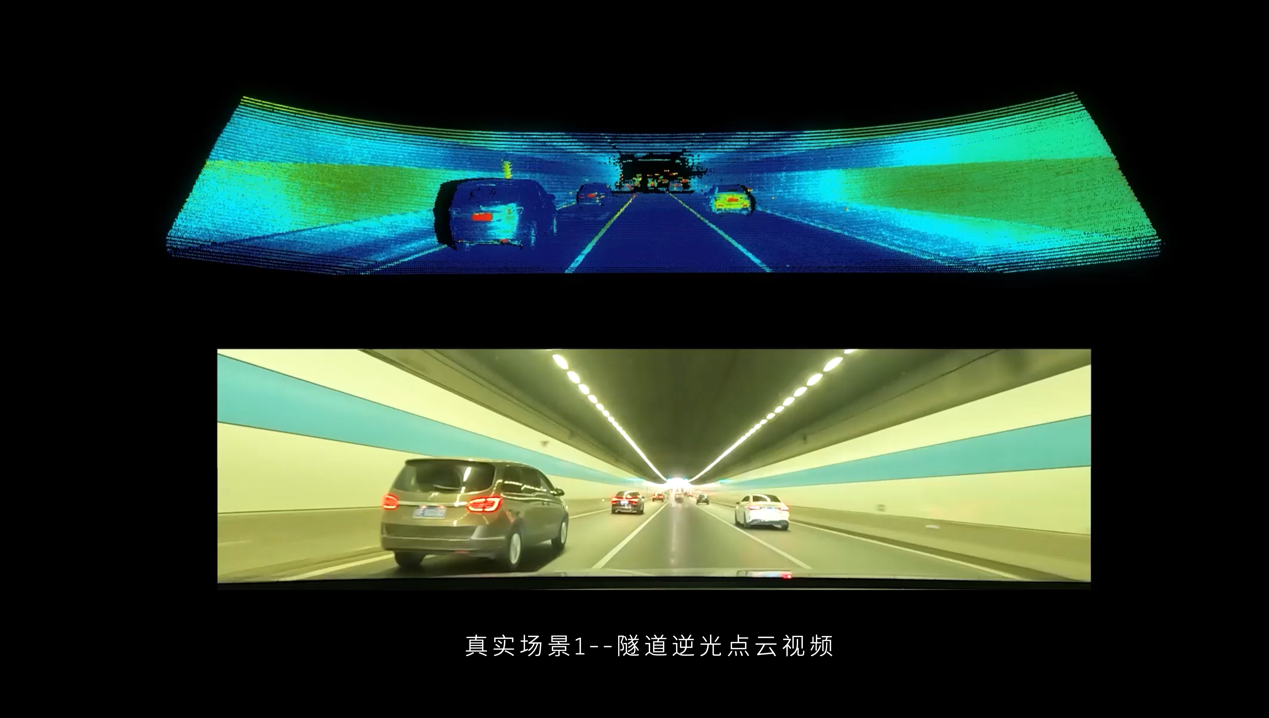
比如在隧道行驶即将驶出时,摄像头的世界里,隧道的尽头是白光,较强的对比度无论是人眼还是摄像头都已经无法清晰辨别物体,进而存在识别偏差的可能。而激光雷达则完全不存在这个问题,隧道里和隧道尽头的所有物体都能清晰地展现在激光雷达里,安全性大大提升。
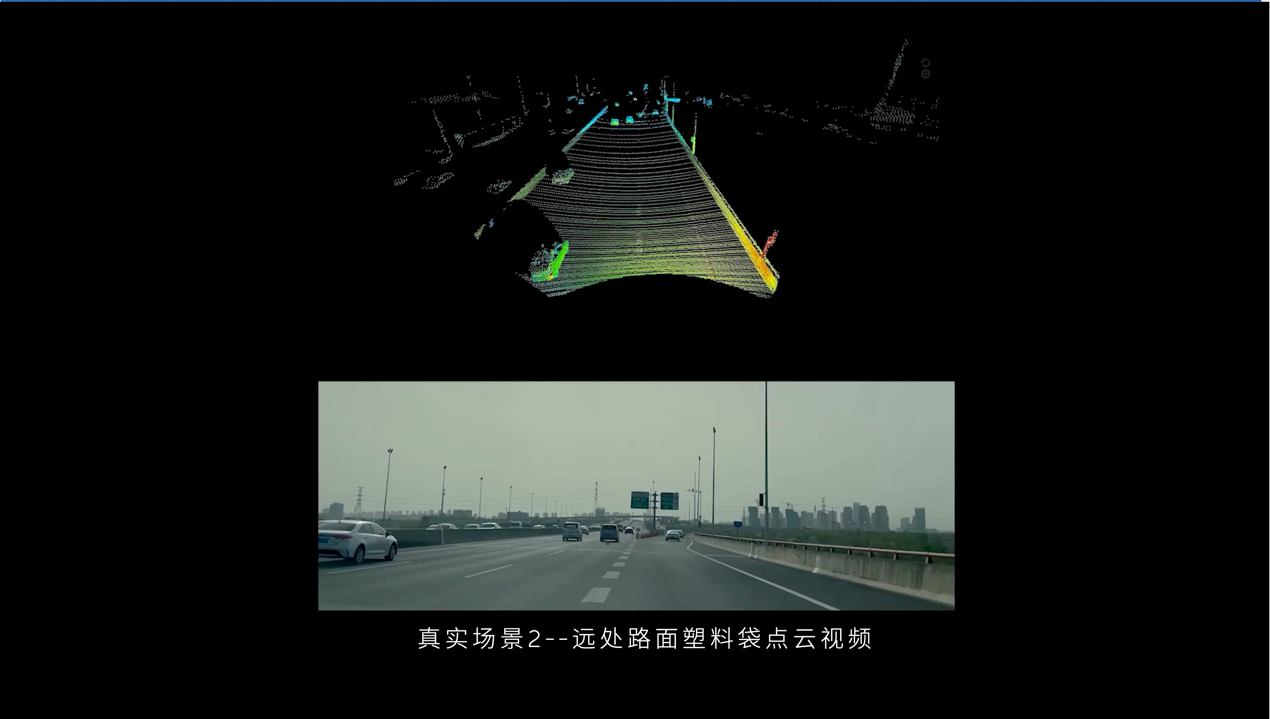
又比如公路上飘动的塑料袋,对于人眼来说可以轻易识别,对行车几乎无影响,然而对于摄像头而言,它很难判断那是一个塑料袋还是一块石头或者是其它什么物体,然后就做出相应动作,进而有可能产生其他不必要的危险。而激光雷达由于具备3D能力,因此在距离很远的地方就能够判断出它是一个很轻很薄的物体,对行车几乎无影响,甚至可以直接识别那是一个塑料袋。
Aquila蔚来超感系统为ET7赋能
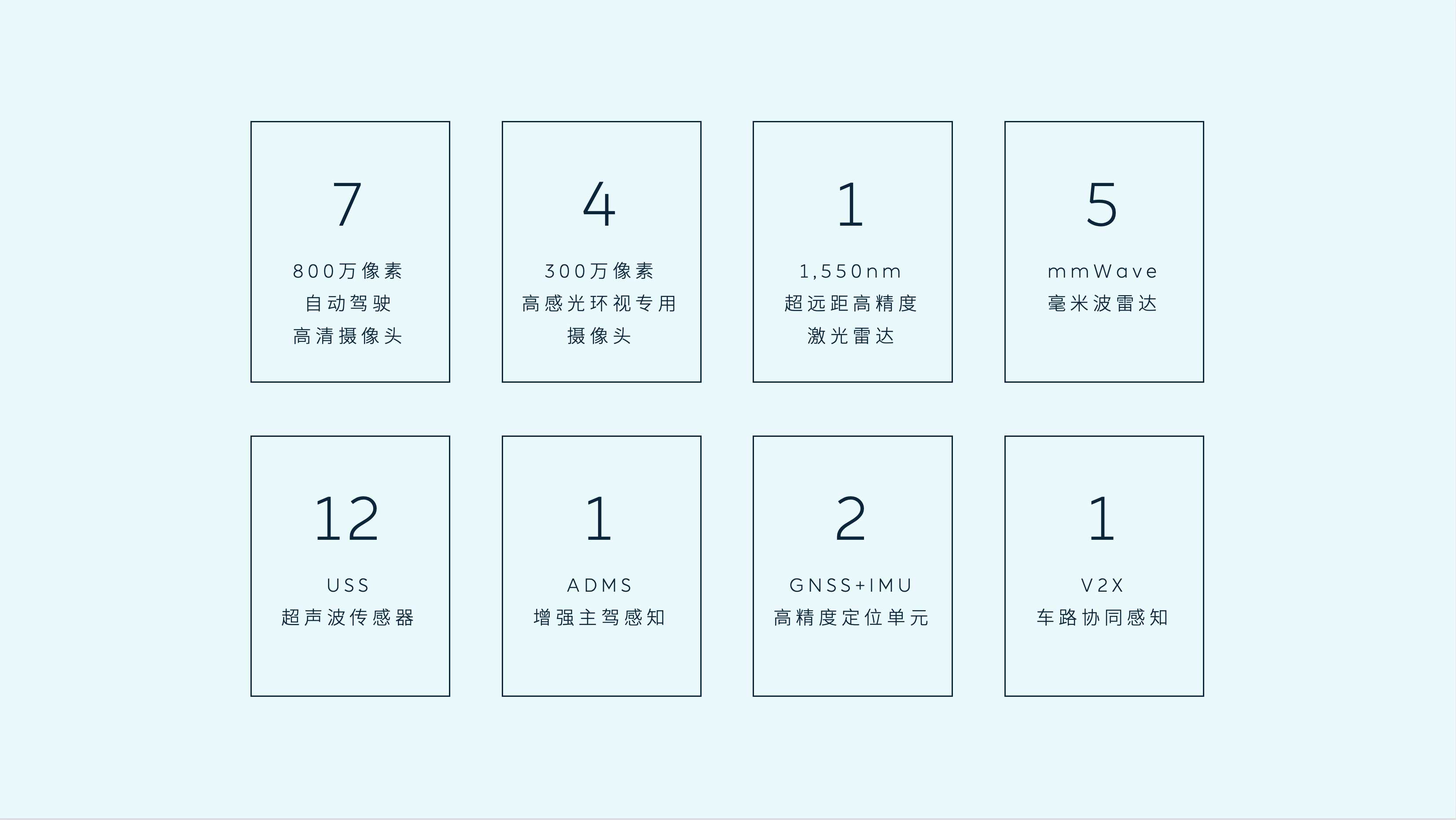
蔚来ET7搭载Aquila蔚来超感系统,配备33个高性能感知硬件,除了车顶的1个超远距高精度激光雷达外,还配有7个800万像素高清摄像头、4个300万像素高感光环视专用摄像头、1个增强主驾感知、5个毫米波雷达、12个超声波传感器、2个高精度定位单元和V2X车路协同系统。

而蔚来ET7搭载的超远距高精度激光雷达则来自Innovusion,最远探测距离达500米,10%反射率下探测距离达250米,拥有120°超广水平视角和0.06°*0.06°超高分辨率,同时是全球首款实现大规模量产的1550nm激光雷达。而据蔚来介绍,这颗激光雷达有以下几个亮点。
波长1550nm:看得更清更远,不伤眼
提起激光,想必很多人第一时间想到的一定是激光不能直射眼睛,否则会产生不可逆的损伤。通常人眼可见光波长范围为380nm~760nm,而1550nm激光则远超人眼识别范围,因此无法在人眼视网膜上聚焦成点,且在通过眼球的过程中大部分都会被水吸收,因此几乎不会对人眼造成伤害。也正是如此,具有更好人眼安全性的1550nm激光雷达可允许输出更高功率,实现更远探测距离。
此外,1550nm波长激光抗干扰能力强、光束准直度更好、光源亮度高,这几个优点也让激光的发射和接收更高效,可以实现更精细的物体识别。
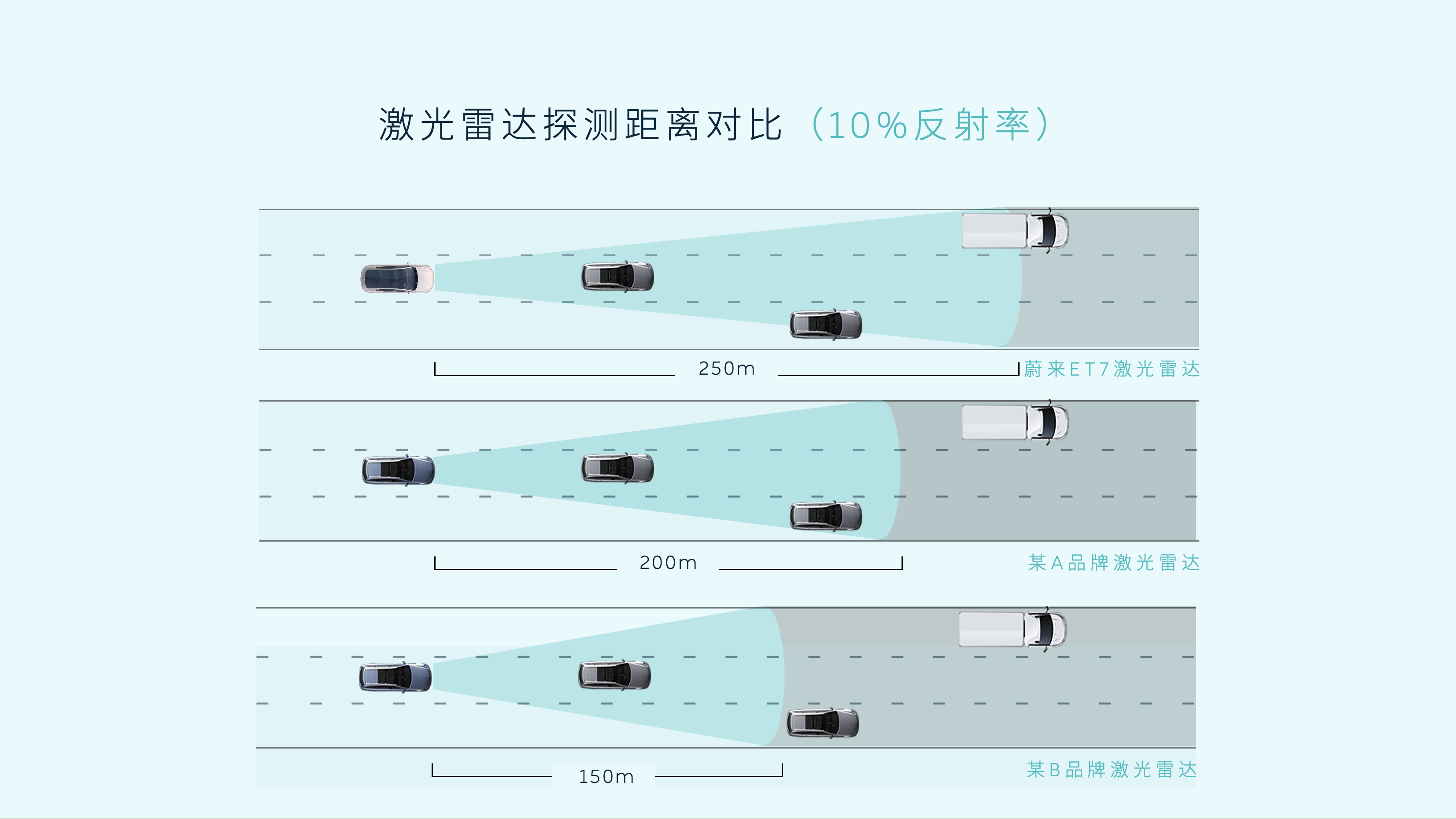
看得远:可更早发现障碍物
蔚来ET7激光雷达最远探测距离可达500米,而在10%反射率标准下的探测距离,可达250米,处于行业领先地位。
新的《道路交通安全违法行为记分管理办法》已于2022年4月1日正式实行,其中有一条新规引起广泛关注,即在高速或者城市快速路上,超速20%以内不扣分。因此,在车流密度允许的情况下,部分高速公路将出现车速达140km/h的车辆。
更快的车速要求车辆具备更远的探测距离:当前方出现危险物体,车辆需要紧急刹停时,车速越高需要的刹停距离越长。因此更长的探测距离,有助于在高速行驶时,更早地发现险情,更早地采取制动,避免事故伤害。
看得清:“定睛凝视”成就图像级激光雷达
要知道,激光雷达工作原理的本质在于光脉冲打在物体上所反射回来的点阵列,结合算法判断物体种类和状态,随后进行相应的动作判断。而随着物体距离激光雷达距离的拉大,点阵列的识别和算法就显得愈发重要。举个例子,距离200米开外的物体,每0.01°的角分辨率变化,相邻的两个点距离约在3.5cm。以0.1°角分辨率的激光雷达为例,其接收到的相邻两点间隔35cm,对于行人、自行车、摩托车这样的目标物体,点云过于稀疏,对于算法挑战极大。
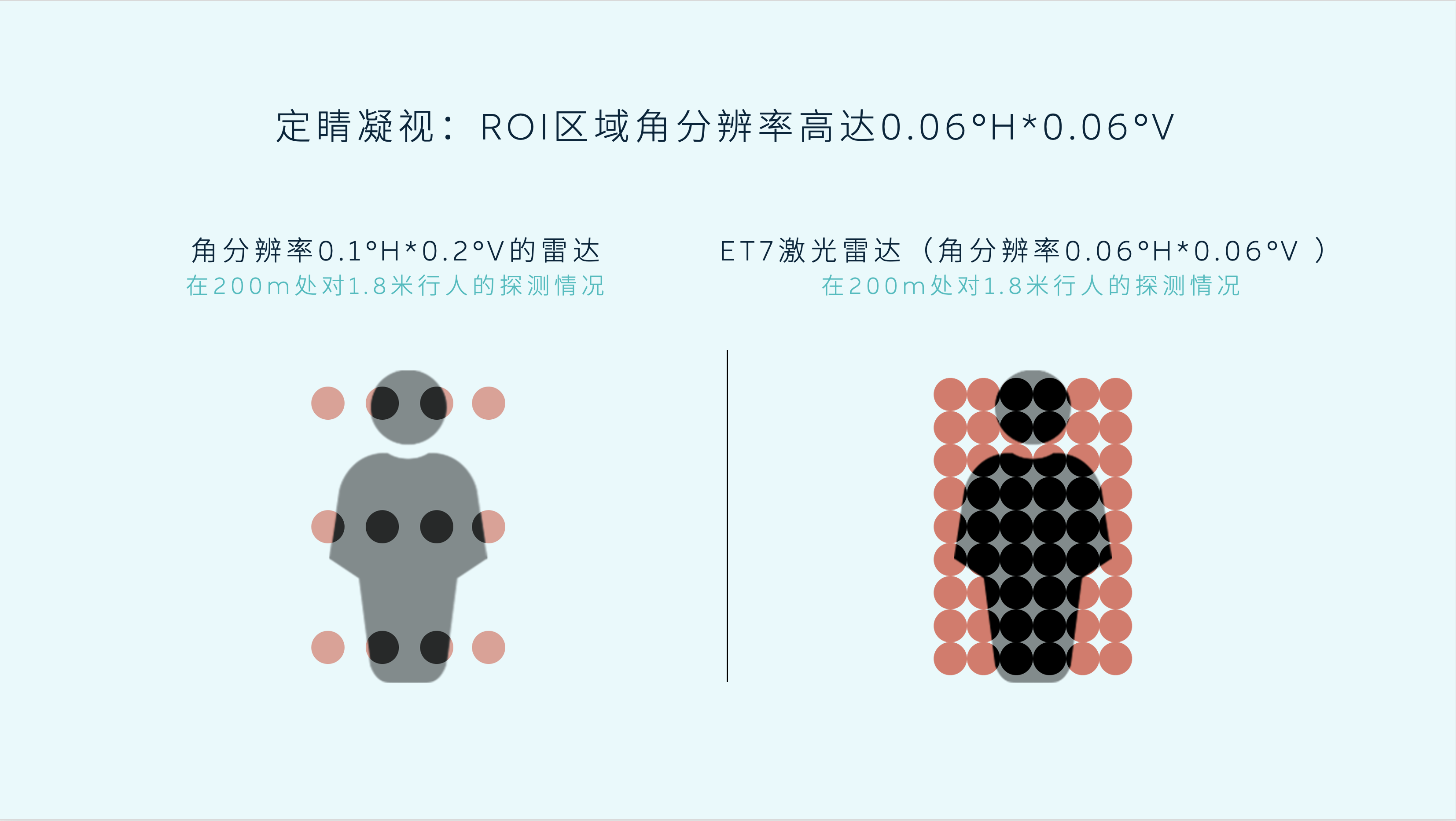
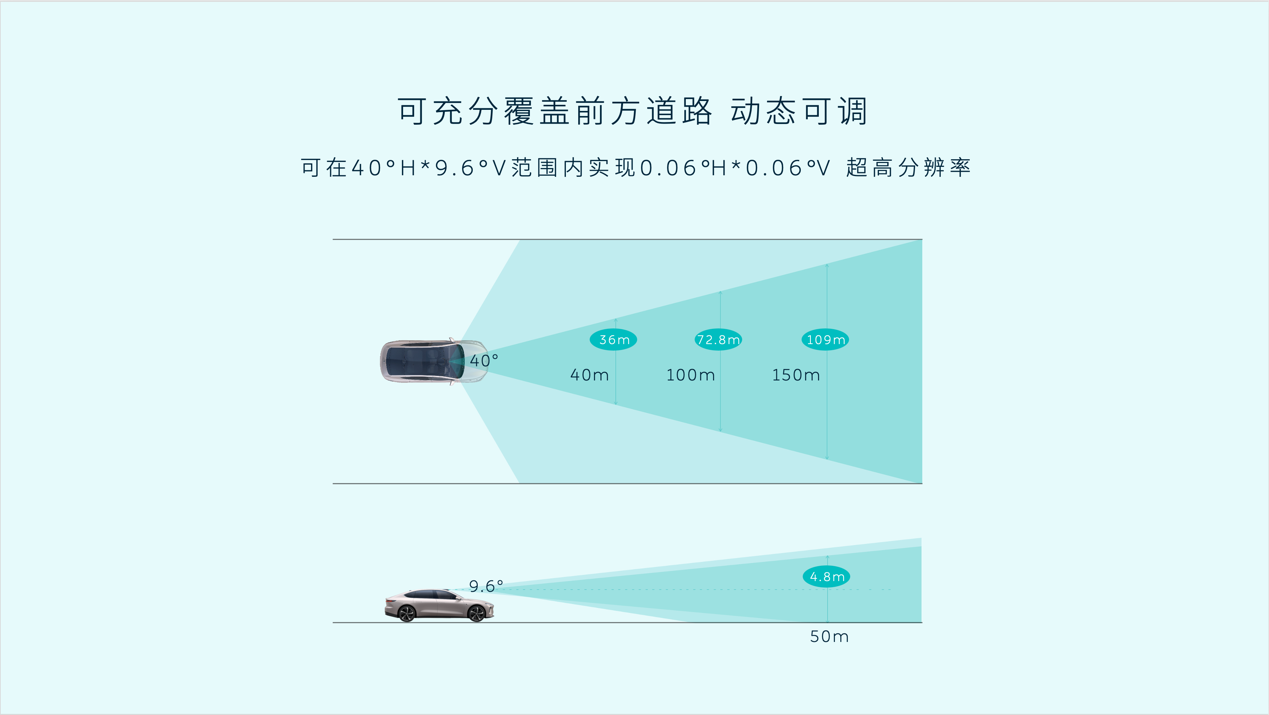
为了解决这一问题,蔚来ET7的激光雷达具备“定睛凝视”功能,可在行车关键视野区域产生角分辨率高达0.06°*0.06°的高密度点云,将该区域的目标看得更清晰。ET7激光雷达的定睛凝视功能范围为25°H(横向)*9.6°V(纵向)。在前方50m处,该区域覆盖范围:横向覆盖达10条车道,纵向覆盖大于一层楼高度,可充分覆盖前方行车区域。
值得一提的是,蔚来ET7激光雷达“定睛凝视”区域策略性选择加密关键区域,而非全局铺满点,可根据需要随时让任意区域分辨率高起来。避免占用不必要的计算资源,增加功耗、带宽等,提升数据利用的有效性,减轻算法压力,更利于整车感知系统运行,真正实现“把“点”用在刀刃上”。
看得稳:感知更精确,行车更安全
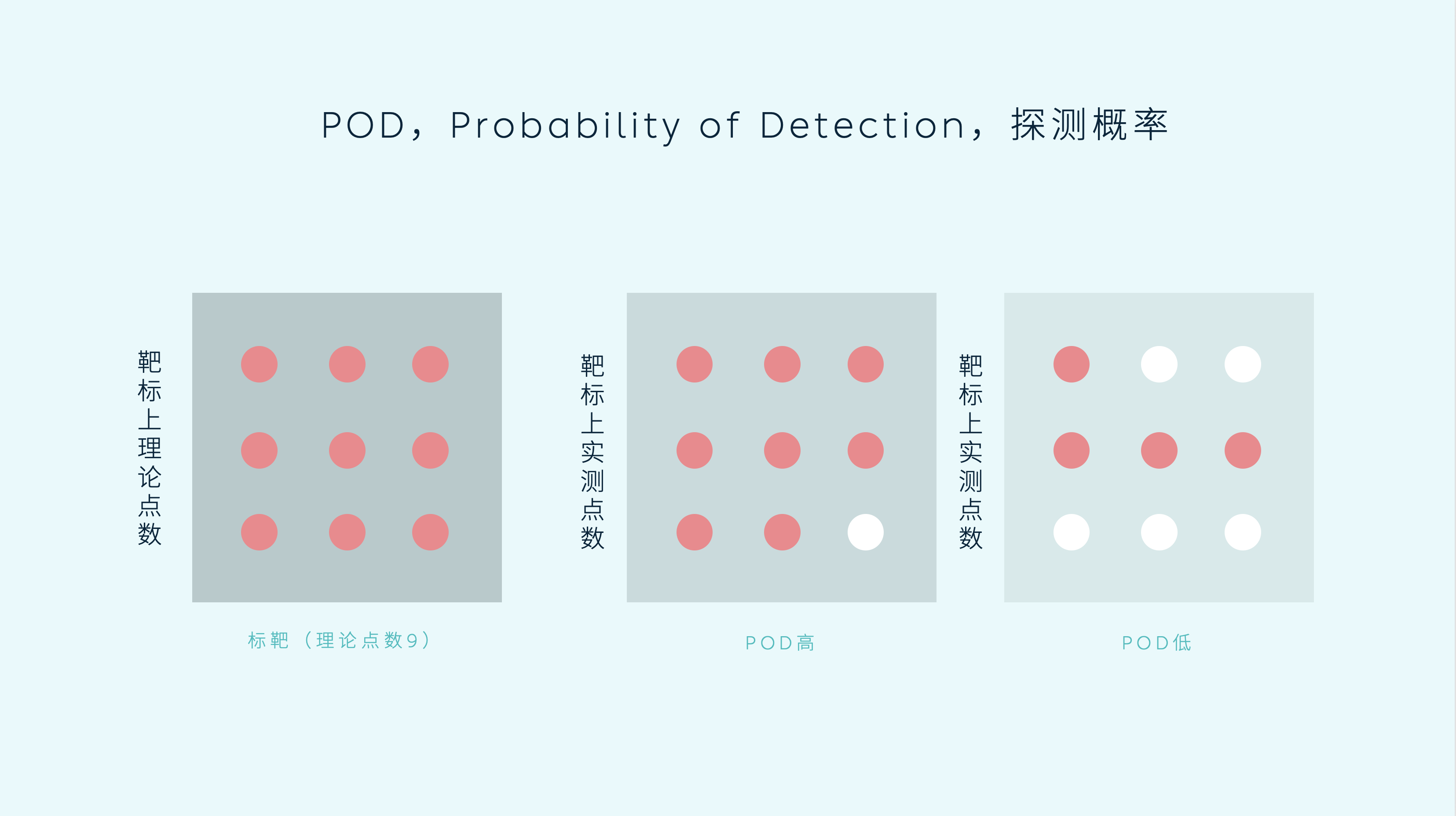
这里要先介绍一个专业词汇:POD,即探测概率Probability of Dectection,一般为超过连续100帧发射的激光束数量(即理论点数量)与被探测到的激光束数量(即有效点数量)的比值。POD体现出激光雷达接收返回点数的能力和稳定性,是反应激光雷达性能的一项重要指标。
那么蔚来的POD表现如何呢?数据显示,感知250m处10%反射率物体的探测概率超过90%,行业领先。而更高的POD,意味着可以让车辆更清晰明确地感知到目标物体,减轻算法压力,实现更远的有效感知距离,提升自动驾驶系统整体的安全性。
Design for AD:科技与美的完美融合
正如文章开头所说,蔚来ET7车顶瞭望塔设计在发布之初引发了不小的争议,虽然它的位置保证了传感器开阔的视野,但也对整车造型以及空气动力学性能提出了更高的挑战。工程团队与设计团队反复试验和打磨,充分考虑了空气动力学(风阻)、整车安全、热管理、防水、空间等多个环节,对壳体线型及圆角进行大量模拟分析及优化验证,寻找最优参数,给用户提供更好的感官体验。

最终,瞭望塔式造型与原始方案(无LiDAR)相比,风噪仅增加0.8db,风阻系数仅增加0.002,最终创造 0.208超低风阻系数,位列全球量产车风阻系数前二。而刚刚发布的蔚来ES7,“瞭望塔”结构进一步优化,对于设计的影响更小,我们也期待蔚来在未来能够有新的突破,让科技和美能够更好地融合。































 粤公网安备 44010602000157号
粤公网安备 44010602000157号


网友评论